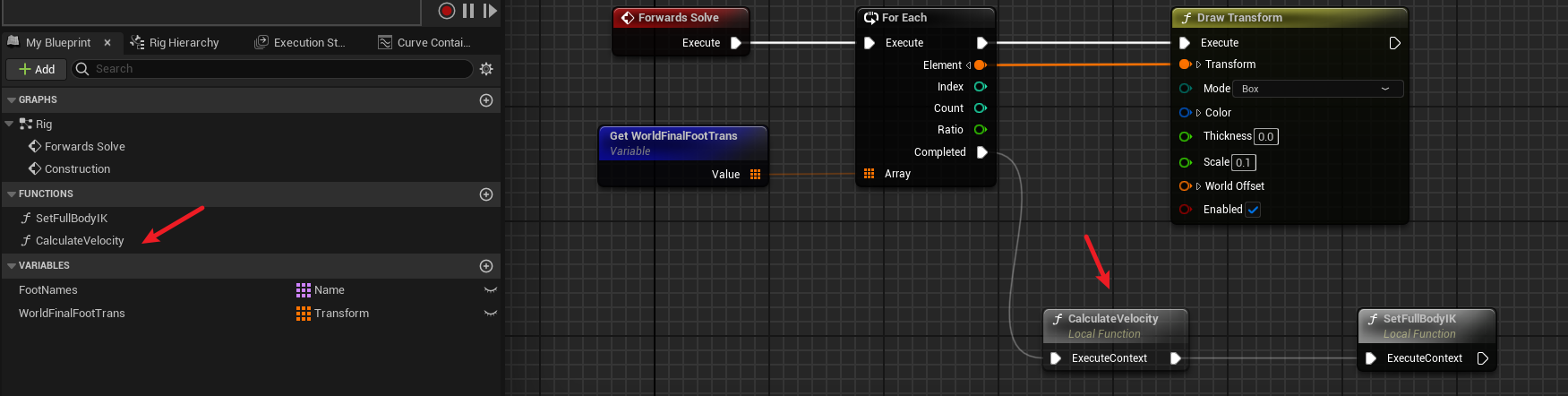
参考 虚幻控制绑定 创建程序化移动周期 创建CalculateVelocity函数 创建CalculateVelocity函数 2025年5月3日 2025年5月9日 需要知道速度和方向。 创建函数 在设置ik前执行 下一篇 计算角色在世界空间中的位移 上一篇 计算速度的方式说明