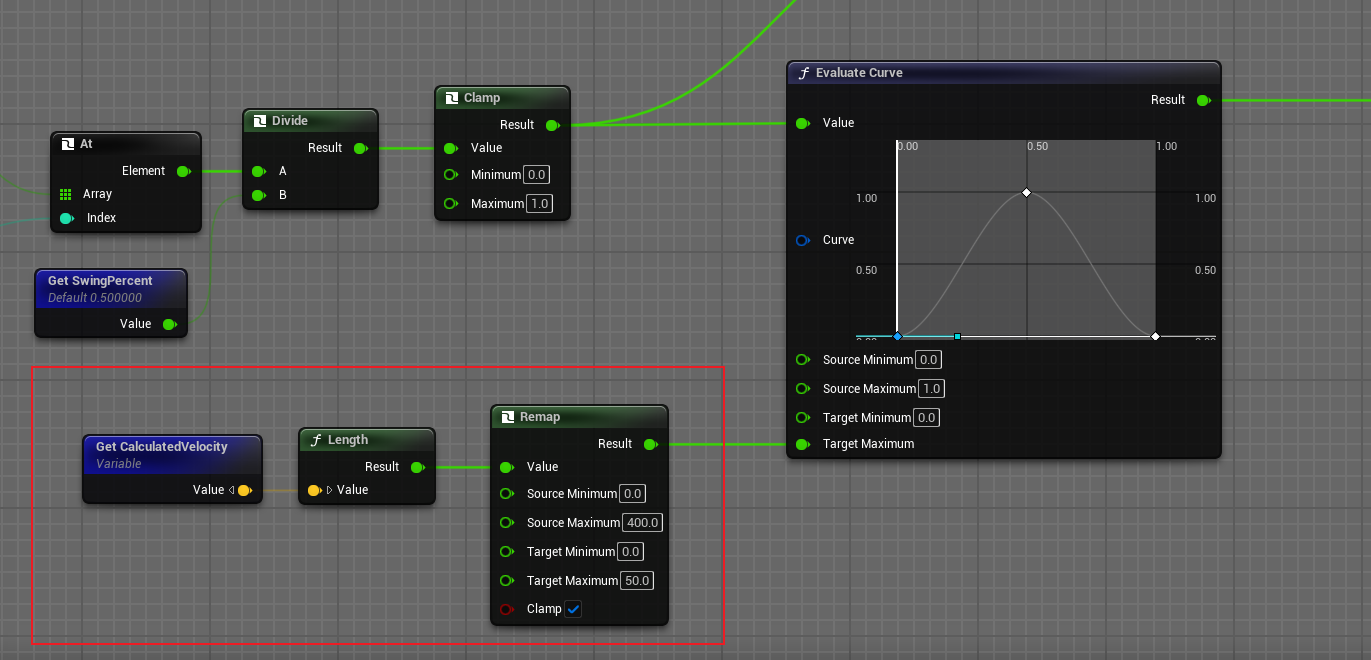
参考 虚幻控制绑定 创建程序化移动周期 使足抬起高度基于移动速度 使足抬起高度基于移动速度 2025年5月4日 2025年5月9日 速度为0时,足不会抬起 下一篇 足轨迹跟踪安排概览 上一篇 使用自定义曲线让足以弧线抬起