找到primary轴和secondary轴
2025年5月9日 2025年5月10日
-
查看骨骼SK_Mannequin
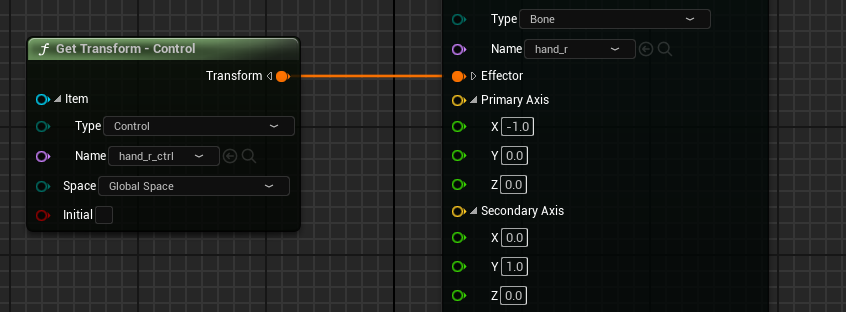
轴 primary 上臂的方向 -x secondary 肘部指向 y 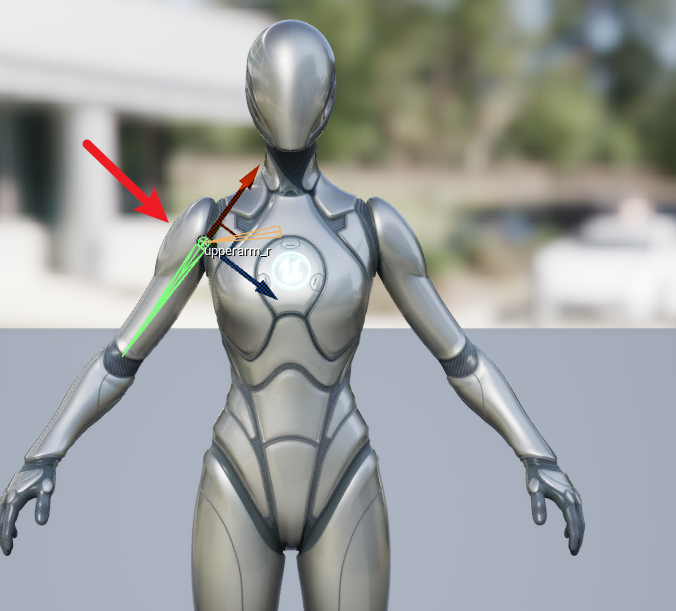
-
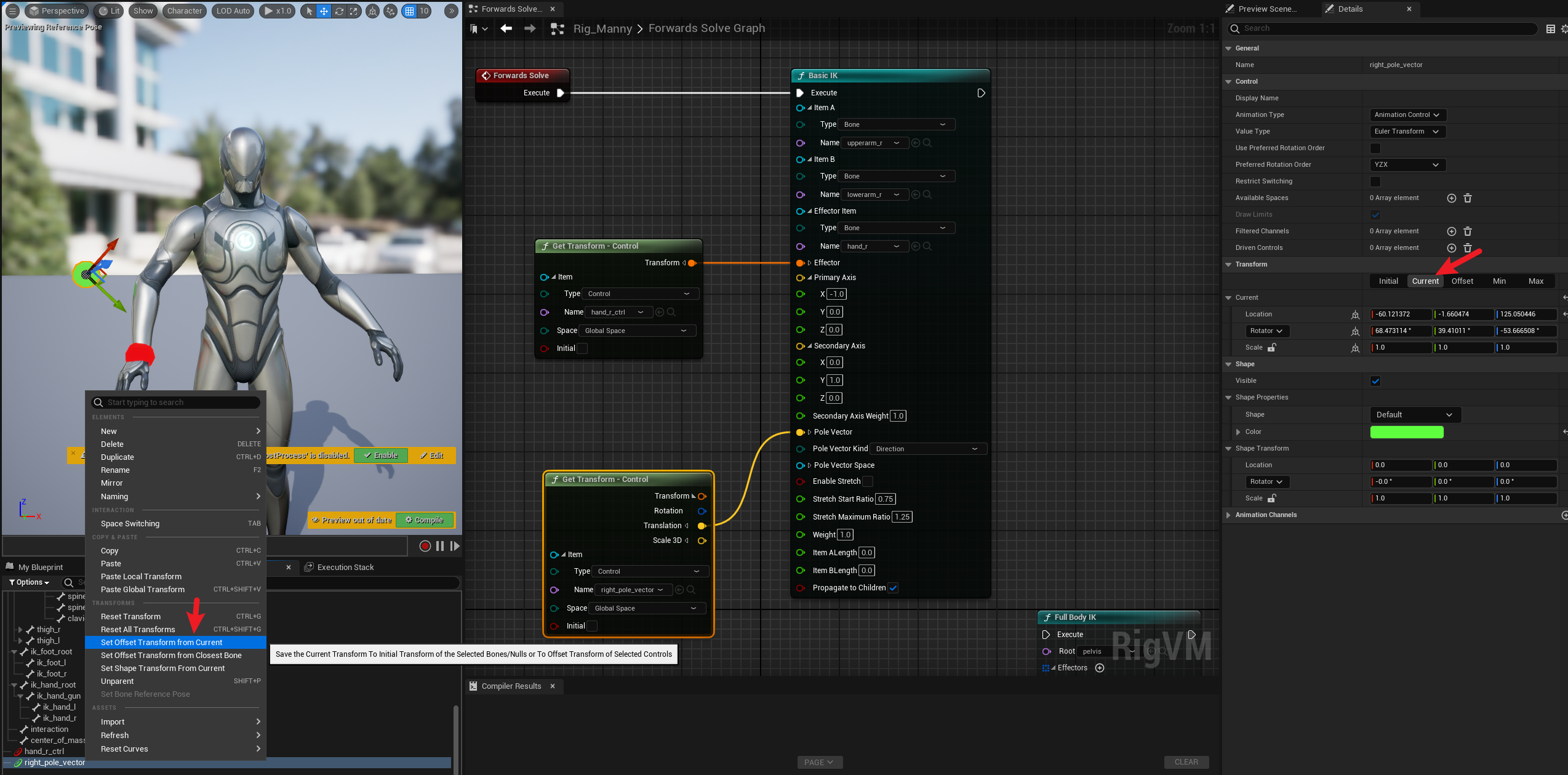
pole向量
肘部指向的位置。BasicIK节点通过pole向量求解手臂的旋转使得手去到目标位置为hand_r新建control,命名为right_pole_vector,设置unparent,拖动到肘部。
设置颜色
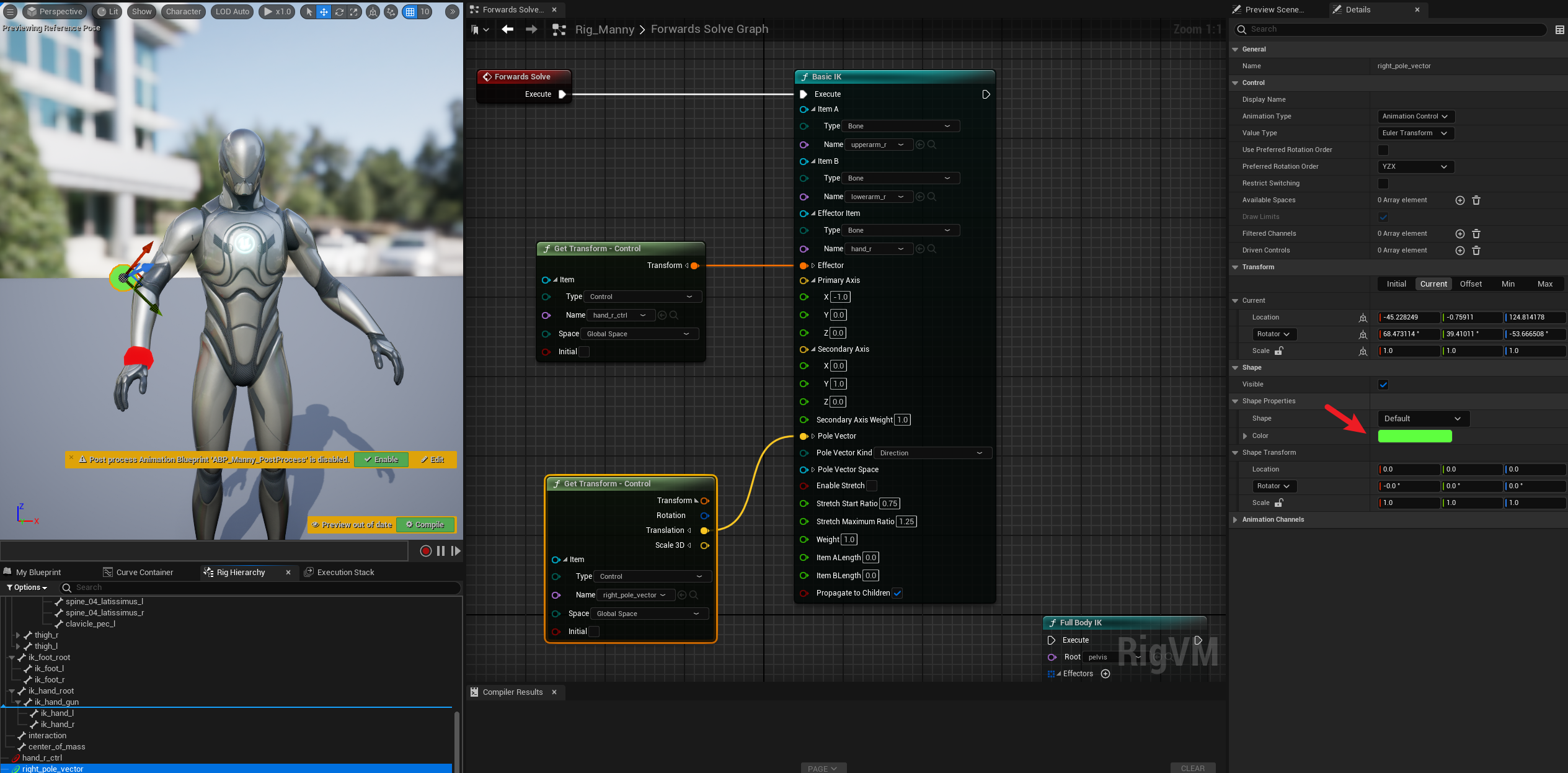
拖动right_pole_vector,可以看到肘关节在旋转。
-
设置right_pole_vector